Apple Carの開発プロジェクト「Titan」は、2024年2月に中止された。しかし、そこで開発されたと目される技術が論文の形で公開された。
その名は「GIGAFLOW」。仮想空間の中に150の車両、歩行者などを生成し、実時間の36万倍の速度で運転を学習できるというものだ。
「GIGAFLOW」のセルフプレイ強化学習は、運転以外にも応用できる。そのため、今後、自動運転以外の領域でこの名前を聞くことがあるかもしれない。
そこで本記事では、AppleがApple Carで“何をしよう”としていたのか。そしてそこで生まれた技術「GIGAFLOW」は、“何に活きている”のかに迫る。
Apple Carこと「Titan」は”すべてのAIプロジェクトの母”
2024年2月に中止が発表された、電気自動車プロジェクト「Titan」。どんな自動車が登場するか楽しみにしていた方も多いだろう。しかし、今となってはどのような開発が行われていたかわからない。
Apple Carのプロジェクト「Titan」について、ティム・クックCEOは2017年6月にブルームバーグのインタビューではじめてその存在を認めた。その際、彼は「Titan」を“すべてのAIプロジェクトの母”と位置づけている。
画像:Bloombarg Technology
このことから、「Titan」の開発の中核は、自動運転システムだったと想像できる。自動運転AIを開発し、そこで開発された要素技術を、デバイス向けAIに応用するという絵を描いていたようだ。
しかし、2022年11月にOpenAIが「ChatGPT」を公開すると、AIの世界は激変した。大規模言語モデル(LLM)が、想像以上にAIの核として利用できることがはっきりし、各社がLLM開発に舵を切ったのだ。
これは筆者の推測だが、Appleも戦略変更が必要になり、プランを組み直した。すると「Titan」プロジェクトが浮いてしまった。そこで、「Titan」に莫大な資金を投入するよりも、LLM開発や各AIプロジェクトに直接投資したほうがいい。そう判断したのではないだろうか。
Apple Car(Titan)は、どんな自動車になる予定だったのか。論文から読み解く
しかし、Appleがどのような自動車をつくる予定だったのか。はたまた、どのようなモビリティの未来を描いていたのか気になる方も多いだろう。
それをうかがわせる論文が公開された。「Robust Autonomy Emerges from Self-Play(堅牢な自律性はセルフプレイから生まれる)」というもので、自動運転AIを訓練するための「GIGAFLOW」と呼ばれる仮装環境を提案している。
この論文には12人の共同執筆者がいるが、全員がAppleの従業員だ。そして、その内4人は「Titan」のプロジェクトに所属していた。そのため、「Titan」のプロジェクトで生まれた技術を整理して、外部に公表できる形にして発表したのではないかと目されている。
自動運転AIの学習は、仮想空間で走ってから、公道試験走行が一般的
自動運転AIの学習は、コンピュータの中で行われるのが一般的だ。実際の交通環境をコンピュータ上に再現し、その中で自動車を走らせて学習を進める。
処理性能が高速なコンピュータを用いれば、“実時間”である必要はない。高速で学習を進められる。そのため、仮想空間内で学習し、公道試験走行でチューニングするのが一般的な手順だ。
しかし、大きな問題がある。それは、“本当に”リアルな環境を仮想空間の中に再現できるかということ。たとえば、多くの学習環境の中では「他者」が投入される。トラックや歩行者が、どのように行動するかをシナリオ化したものだ。自動運転AIは、その中をうまく走行できるように学習が進められていく。
自動運転の“リアル”な交通環境を構築するのは困難
ところが、これは現実世界をリアルに再現しているとは言えない。なぜなら、現実世界には、マナー違反であると知りつつ、割り込む車もあるからだ。さらに、場合によっては、交通違反と知りつつも、追い越しする車もある。
もっと言えば、私たちも道路交通法を厳密に守っているわけではない。たとえば、車線変更をするときがそうだ。正しい手順は「車線変更する3秒前に、方向指示器を点灯させる」。しかし、これをきちんと守っている人は多くない。
なぜなら、3秒もウィンカーを出したまま走行するのは、かえって危険だからだ。後方の車が、車線変更をする意思があるのか図りかねる。そして譲るべきか追い越すべきか迷ってしまう。
そこで、多くの人は、まず変更する側の車線に寄せ、車線変更する意思があることを周囲に伝える。それから安全確認をしてウィンカーを点灯し、だいたい1秒以内に車線変更しているだろう。これは、道路交通法の手順とは異なるが、多くのドライバーはこのほうが安全であることを経験から知っている。
これは、道路交通法を軽視しているのではない。現実の中で、より安全性を高めるためにしていることだ。私たちは車を運転するとき、ほかの車とのコミュニケーションを優先して安全を確保している。
「GIGAFLOW」では、登場する自動車もその運転の荒さもランダム。だから、学習速度が速い!
そこで「GIGAFLOW」では、先入観に基づく設定を使っておらず、すべての車がゼロから学習を進めていく方式を採用している。最大150の自動車、二輪車、歩行者などの「他者」が生成され、自動運転AIとともに学習を進めていく。
交通法規の遵守度、最短時間での走行など、いくつかの評価項目がある。それをどの程度重視して学習するかは、「他者」ごとにランダムに決められる。これにより、環境の中では運転の荒い車から保守的な車までさまざまな車が現れるのだ。
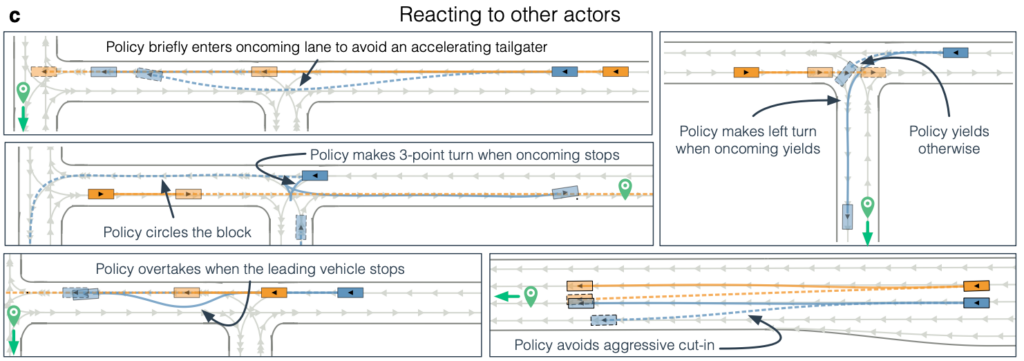
画像:Robust Autonomy Emerges from Self-Play
このような状況下でシミュレーションすると、最初は車が衝突ばかりしてしまう。しかし、「GIGAFLOW」は8枚のGPUを使うことで、1時間に44億回の状態遷移が可能だ。これは720万kmの走行に相当し、運転経験42年分に相当する。つまり、実時間の36万倍の速度で学習を進められるのだ。
このように、自分もほかの車も同時に学習を進めることを「セルフプレイ強化学習」と呼ぶ。最近の自動運転AIの学習のトレンドだ。
自動運転AIの事故率も、「GIGAFLOW」の訓練で削減できる!
「GIGAFLOW」では、4800のテストコース(走行距離40kmから136km)が生成され、その中で学習が進められていく。
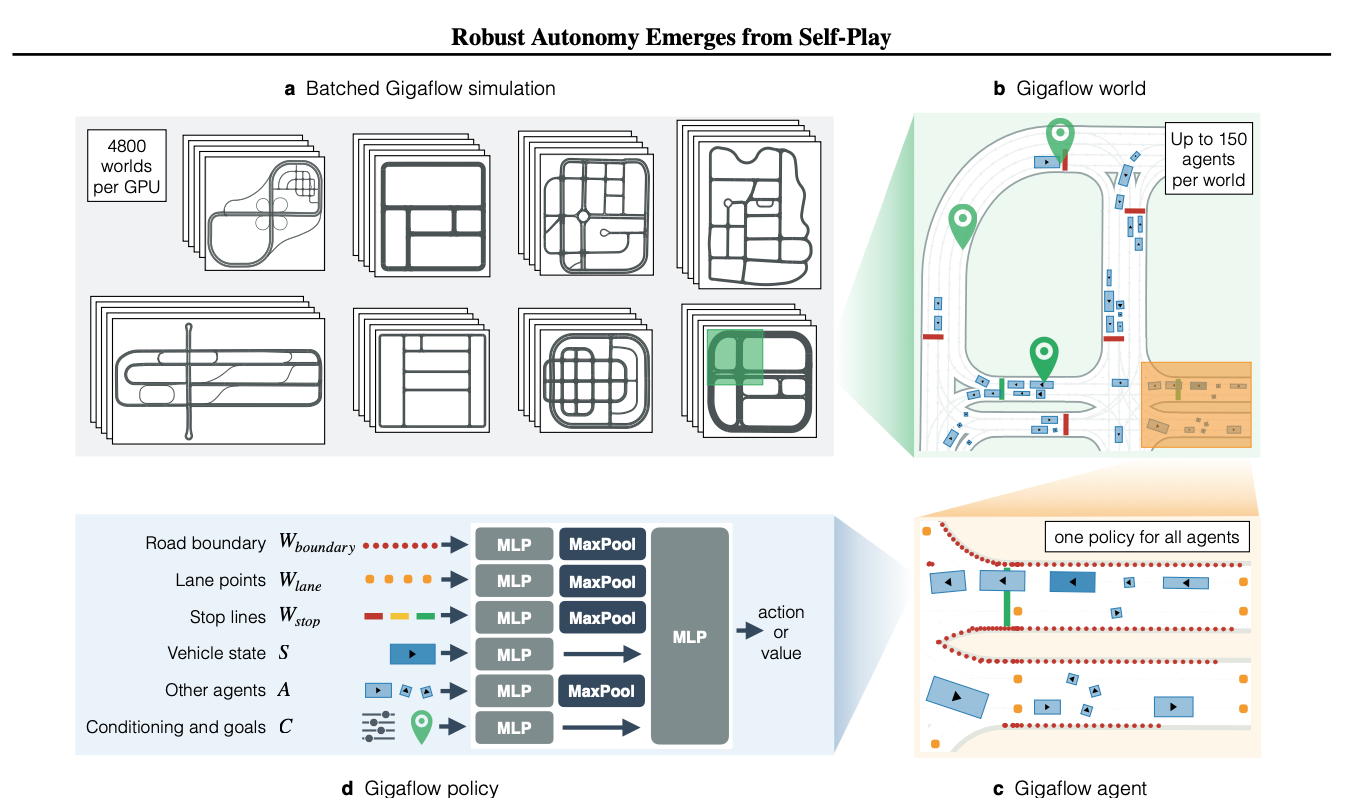
画像:Robust Autonomy Emerges from Self-Play
たとえば、車線規制が行われている道路での合流では、1億回の状態遷移では、全車が接触してしまうというありさまだった。しかし、1000億回の状態遷移を経ると、全車が接触せずに車線規制を通過できた。
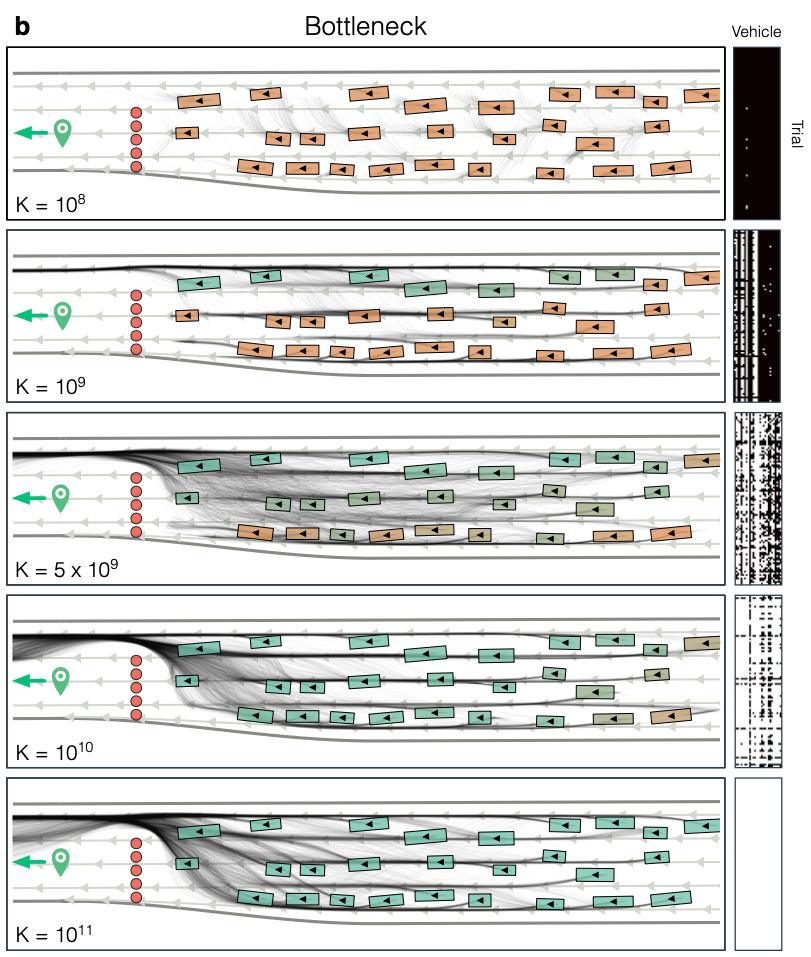
画像:Robust Autonomy Emerges from Self-Play
この「GIGAFLOW」で訓練することにより、自動運転AIの事故率は大幅に削減された。連続運転17.5年、走行距離300万km以上に1回という小さなものになっている。
将棋の対戦用AIも、空港の人員誘導もお任せあれ。
なぜAppleは、ここまでやりながらプロジェクトを放棄したのだろう。実はこの「GIGAFLOW」は、自動運転専用ではなく、ほかの分野にも応用が効く。
たとえば、将棋や囲碁のAIをつくるときがそうだ。人間が手取り足取り戦略を教えるのではなく、このようなセルフプレイ強化学習があたりまえになっている。これは、RPGゲームなどに応用することもできる。何度尋ねても同じセリフを繰り返す村人ではなく、リアルな対応ができる村人が生成できるのだ。
それだけではない。たとえば、駅や空港、イベントで群衆をどのように誘導すれば安全性が高まるか。はたまた、スムースに移動できるかなど、さまざまな施策を試行錯誤できるようになる。
あるいは、店舗の店員と来店客を「GIGAFLOW」で生成することも可能だ。売上を伸ばしたり、顧客体験を改善させたりするための施策を実験できる。「GIGAFLOW」は、さまざまなシーンに応用が効く技術なのだ。
自動運転車の計画は放棄されてしまったが、まったく違った分野で「GIGAFLOW」の名前を目にすることになるだろう。Apple Carは消えてしまったが、Apple Carで開発された技術は今後も生き続けるのだ。
おすすめの記事



![なぜ、Macのキーボードには[Backspace]がないのか。そして、[delete]キーがWindows PCの[Backspace]と同じ挙動をする理由は?](https://macfan.book.mynavi.jp/wp-content/uploads/2025/03/1122048-256x192.jpg)
著者プロフィール

牧野武文
フリーライター/ITジャーナリスト。ITビジネスやテクノロジーについて、消費者や生活者の視点からやさしく解説することに定評がある。IT関連書を中心に「玩具」「ゲーム」「文学」など、さまざまなジャンルの書籍を幅広く執筆。



